Path Constraints
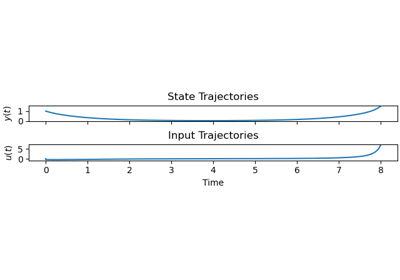
Hypersensitive Control
Delay Equation (Göllmann, Kern, and Maurer)
Fixed Duration Pendulum Swing Up
Variable Duration Pendulum Swing Up
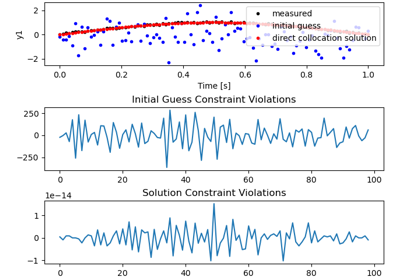
Parameter Identification: Betts & Huffman 2003
Multi-minimum Parameter Identification
Compare DAE vs. ODE Formulation
Hilly Race
Brachistochrone
Light Diffraction
Block Sliding Over a Hill
Quarter Car Model on a Bumpy Road
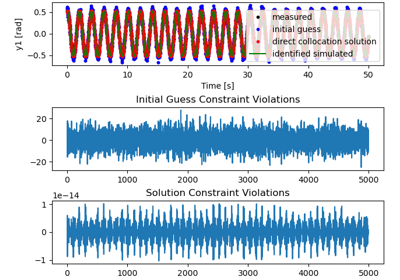
Parameter Identification from Noncontiguous Measurements
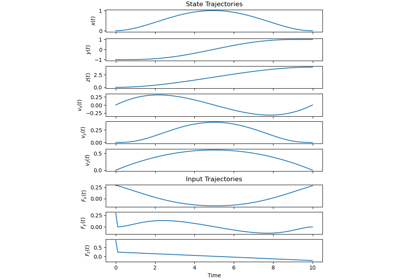
Parallel Park a Car
Bicycle Countersteering
Crane Moving a Load
Upright a Double Pendulum
Drone Flight
Singular Arc Problem
Mississippi Steamboat
Car on a Race Course
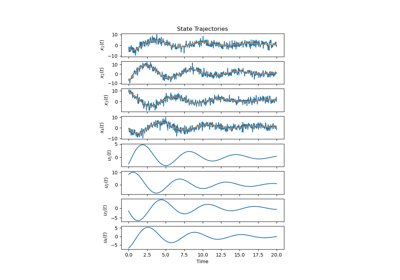
Standing Balance Control Identification
Sit to Stand
Human Gait
Car around Pylons
Park a Car in a Garage
Ball Rolling on Spinning Disc
Particle Flight in Tube
Planar 2D Human Standing Model
One-Legged Cycling Time Trial
Gallery generated by Sphinx-Gallery