Note
Go to the end to download the full example code.
Delay Equation (Göllmann, Kern, and Maurer)¶
Objectives¶
A simple example to show how to handle inequality constraints.
Shows how instance constraints on one state variable may explicitly depend on an instance of another state variable at a different time.
Introduction¶
This is example 10.50 from [Betts2010].
States
\(x_1, x_2, x_3. x_4. x_5, x_6\) : state variables
Controls
\(u_1, u_2, u_3, u_4, u_5, u_6\) : control variables
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
import matplotlib.pyplot as plt
from opty.direct_collocation import Problem
from opty.utils import create_objective_function, MathJaxRepr
Equations of Motion¶
There are six differential equations:
and six algebraic inequality constraints:
x1, x2, x3, x4, x5, x6 = me.dynamicsymbols('x1, x2, x3, x4, x5, x6')
u1, u2, u3, u4, u5, u6 = me.dynamicsymbols('u1, u2, u3, u4, u5, u6')
t = me.dynamicsymbols._t
x0 = 1.0
u_minus_1, u0 = 0.0, 0.0
eom = sm.Matrix([
# equality constraints
-x1.diff(t) + x0*u_minus_1,
-x2.diff(t) + x1*u0,
-x3.diff(t) + x2*u1,
-x4.diff(t) + x3*u2,
-x5.diff(t) + x4*u3,
-x6.diff(t) + x5*u4,
# inequality constraints
u1 + x1,
u2 + x2,
u3 + x3,
u4 + x4,
u5 + x5,
u6 + x6,
])
MathJaxRepr(eom)
Define and Solve the Optimization Problem¶
num_nodes = 501
t0, tf = 0.0, 1.0
interval_value = (tf - t0)/(num_nodes - 1)
state_symbols = (x1, x2, x3, x4, x5, x6)
unknown_input_trajectories = (u1, u2, u3, u4, u5, u6)
Specify the objective function and form the gradient.
objective = sm.Integral(
x1**2 + x2**2 + x3**2 + x4**2 + x5**2 + x6**2 +
u1**2 + u2**2 + u3**2 + u4**2 + u5**2 + u6**2, t)
obj, obj_grad = create_objective_function(
objective,
state_symbols,
unknown_input_trajectories,
tuple(),
num_nodes,
interval_value,
time_symbol=t,
)
MathJaxRepr(objective)
Specify the instance constraints
instance_constraints = (
x1.func(t0) - 1.0,
x2.func(t0) - x1.func(tf),
x3.func(t0) - x2.func(tf),
x4.func(t0) - x3.func(tf),
x5.func(t0) - x4.func(tf),
x6.func(t0) - x5.func(tf),
u1.func(t0) + x1.func(t0) - 0.5,
u2.func(t0) + x2.func(t0) - 0.5,
u3.func(t0) + x3.func(t0) - 0.5,
u4.func(t0) + x4.func(t0) - 0.5,
u5.func(t0) + x5.func(t0) - 0.5,
u6.func(t0) + x6.func(t0) - 0.5,
)
Specify the bounds on the inequality constraints in the equations of motion. The key should match the corresponding index of the equation to apply the bounds to.
eom_bounds = {
6: (0.3, np.inf),
7: (0.3, np.inf),
8: (0.3, np.inf),
9: (0.3, np.inf),
10: (0.3, np.inf),
11: (0.3, np.inf),
}
Solve the Optimization Problem¶
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
time_symbol=t,
backend='numpy',
eom_bounds=eom_bounds,
)
prob.add_option('max_iter', 1000)
initial_guess = np.random.rand(prob.num_free)*0.1
solution, info = prob.solve(initial_guess)
initial_guess = solution
print(info['status_msg'])
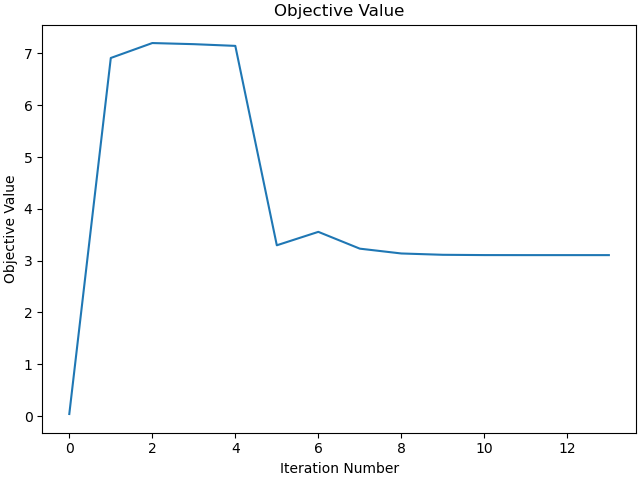
print(f'Objective value achieved: {info["obj_val"]: .4f}, as per the book '
f'it is {3.10812211}, so the error is: '
f'{(info["obj_val"] - 3.10812211)/3.10812211*100: .3f} % ')
print('\n')
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Objective value achieved: 3.1073, as per the book it is 3.10812211, so the error is: -0.027 %
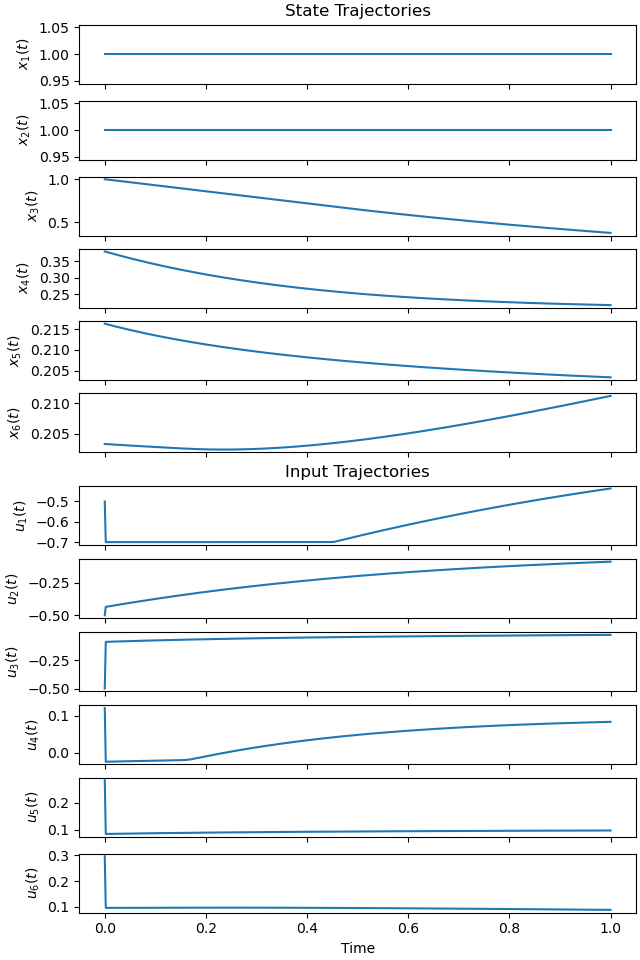
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
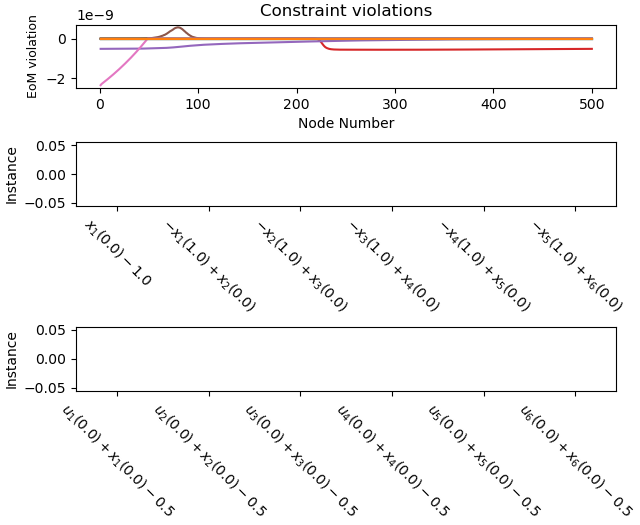
Plot the constraint violations. sphinx_gallery_thumbnail_number = 2
_ = prob.plot_constraint_violations(solution)
Plot the objective function.
_ = prob.plot_objective_value()
plt.show()
Total running time of the script: (0 minutes 6.715 seconds)