Note
Go to the end to download the full example code.
Variable Duration Pendulum Swing Up¶
Objectives¶
Demonstrate how to make the simulation duration variable.
Show how to use the NumPy backend which solves the problem without needing just-in-time C compilation.
Demonstrate plotting the constraint violations as subplots.
Show how to access the problem’s attributes and methods inside the objective and gradient functions to help simplify constructing the objective and gradient values.
Introduction¶
Given a simple pendulum that is driven by a torque about its joint axis, swing the pendulum from hanging down to standing up in a minimal amount of time using minimal input energy with a bounded torque magnitude.
Notes¶
There is a mechanically identiclal system in the examples-gallery/beginner folder that uses a fixed duration.
import os
import numpy as np
import sympy as sm
from opty import Problem
import matplotlib.pyplot as plt
import matplotlib.animation as animation
Start with defining the fixed duration and number of nodes.
target_angle = np.pi
num_nodes = 501
Symbolic equations of motion
m, g, d, t, h = sm.symbols('m, g, d, t, h', real=True)
theta, omega, T = sm.symbols('theta, omega, T', cls=sm.Function)
state_symbols = (theta(t), omega(t))
constant_symbols = (m, g, d)
specified_symbols = (T(t),)
eom = sm.Matrix([theta(t).diff() - omega(t),
m*d**2*omega(t).diff() + m*g*d*sm.sin(theta(t)) - T(t)])
sm.pprint(eom)
⎡ d ⎤
⎢ -ω(t) + ──(θ(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ 2 d ⎥
⎢d ⋅m⋅──(ω(t)) + d⋅g⋅m⋅sin(θ(t)) - T(t)⎥
⎣ dt ⎦
Specify the known system parameters.
par_map = {
m: 1.0,
g: 9.81,
d: 1.0,
}
Specify the objective function and it’s gradient. In this case, make the
problem instance the first argument and it is available to use inside the
these functions. This shows how to use .parse_free(),
.extract_values(), and .fill_free() to manage the numerical vectors.
def obj(prob, free):
"""Minimize the sum of the squares of the control torque."""
_, T_vals, _, h_val = prob.parse_free(free)
return h_val*np.sum(T_vals**2)
def obj_grad(prob, free):
T_vals = prob.extract_values(free, T(t))
h_val = prob.extract_values(free, h)
grad = np.zeros_like(free)
prob.fill_free(grad, 2.0*h_val*T_vals, T(t))
prob.fill_free(grad, np.sum(T_vals**2), h)
return grad
Specify the symbolic instance constraints, i.e. initial and end conditions using node numbers 0 to N - 1
instance_constraints = (theta(0*h),
theta((num_nodes - 1)*h) - target_angle,
omega(0*h),
omega((num_nodes - 1)*h))
Create an optimization problem. If the backend is set to numpy, no C
compiler is needed and the problem can be solved using pure Python code.
There is a large performance loss but for simple problems performance may not
be a concern.
prob = Problem(obj, obj_grad, eom, state_symbols, num_nodes, h,
known_parameter_map=par_map,
instance_constraints=instance_constraints,
time_symbol=t,
bounds={T(t): (-2.0, 2.0), h: (0.0, 0.5)},
backend='numpy')
Use existing solution if available else pick a reasonable initial guess and solve the problem. Use approximately zero as an initial guess to avoid divide-by-zero, and solve the problem.
fname = f'pendulum_swing_up_variable_duration_{num_nodes}_nodes_solution.csv'
if os.path.exists(fname):
solution = np.loadtxt(fname)
else:
initial_guess = np.full(prob.num_free, 1e-10)
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
print(info['obj_val'])
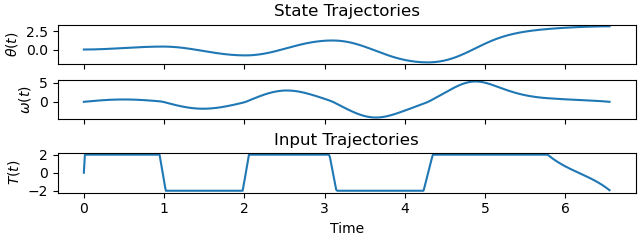
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
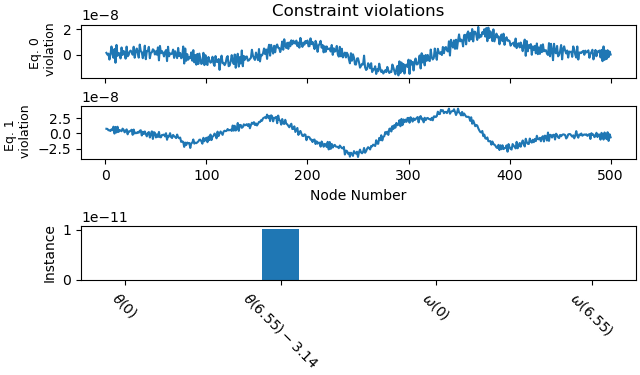
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution, subplots=True)
Animate the pendulum swing up.
interval_value = solution[-1]
time = prob.time_vector(solution=solution)
angle = solution[:num_nodes]
fig = plt.figure()
ax = fig.add_subplot(111, aspect='equal', autoscale_on=False,
xlim=(-2, 2), ylim=(-2, 2))
ax.grid()
line, = ax.plot([], [], 'o-', lw=2)
time_template = 'time = {:0.1f}s'
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
def init():
line.set_data([], [])
time_text.set_text('')
return line, time_text
def animate(i):
x = [0, par_map[d]*np.sin(angle[i])]
y = [0, -par_map[d]*np.cos(angle[i])]
line.set_data(x, y)
time_text.set_text(time_template.format(i*interval_value))
return line, time_text
ani = animation.FuncAnimation(fig, animate, range(0, num_nodes, 4),
interval=int(interval_value*1000*4),
blit=True, init_func=init)
plt.show()
Total running time of the script: (0 minutes 38.748 seconds)