Note
Go to the end to download the full example code.
Block Sliding Over a Hill¶
Objective¶
Show how to use fixed time interval and variable time interval on a very simple example.
Show the use of
backend='numpy'in theProblemclass which sets up small problems faster.
Introduction¶
A block, modeled as a particle is sliding on a road to cross a hill. The block is subject to gravity and speed dependent viscous friction. Gravity points in the negative Y direction. A force tangential to the road is applied to the block to make it move.
Two objective functions to be minimized will be considered:
selection = 0: time to reach the end point is minimizedselection = 1: integral sum of the applied force is minimized
Constants
m: mass of the block [kg]g: acceleration due to gravity [m/s**2]friction: coefficient of viscous friction [N/(m*s)]a,b: parameters determining the shape of the road.
States
x: position of the block along the road [m]ux: speed of the block tangent to the road [m/s]
Specifieds
F: tangential force applied to the block [N]
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
from opty import Problem
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
The function below defines the shape of the road the block is sliding on.
def strasse(x, a, b):
return a*x**2*sm.exp((b - x))
Set up Kane’s equations of motion.
N = me.ReferenceFrame('N')
O = me.Point('O')
P0 = me.Point('P0')
t = me.dynamicsymbols._t
x = me.dynamicsymbols('x')
ux = me.dynamicsymbols('u_x')
F = me.dynamicsymbols('F')
m, g, friction = sm.symbols('m, g, friction')
a, b = sm.symbols('a b')
O.set_vel(N, 0)
P0.set_pos(O, x*N.x + strasse(x, a, b)*N.y)
P0.set_vel(N, ux*N.x + strasse(x, a, b).diff(x)*ux*N.y)
bodies = [me.Particle('P0', P0, m)]
The control force and the friction are acting in the direction of the tangent at the road at the point where the particle is.
alpha = sm.atan(strasse(x, a, b).diff(x))
forces = [(P0, -m*g*N.y + F*(sm.cos(alpha)*N.x + sm.sin(alpha)*N.y) -
friction*ux*(sm.cos(alpha)*N.x + sm.sin(alpha)*N.y))]
kd = sm.Matrix([ux - x.diff(t)])
q_ind = [x]
u_ind = [ux]
kane = me.KanesMethod(N, q_ind=q_ind, u_ind=u_ind, kd_eqs=kd)
fr, frstar = kane.kanes_equations(bodies, forces)
eom = kd.col_join(fr + frstar)
sm.trigsimp(eom)
sm.pprint(eom)
speicher = (x, ux, F)
⎡ ↪
⎢ ↪
⎢ ↪
⎢ ↪
⎢ ↪
⎢ friction⋅uₓ(t) ⎛ 2 b - x(t ↪
⎢- ─────────────────────────────────────────────────── - m⋅⎝- a⋅x (t)⋅ℯ ↪
⎢ _______________________________________________ ↪
⎢ ╱ 2 ↪
⎢ ╱ ⎛ 2 b - x(t) b - x(t)⎞ ↪
⎣ ╲╱ ⎝a⋅x (t)⋅ℯ - 2⋅a⋅x(t)⋅ℯ ⎠ + 1 ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ ) b - x(t)⎞ ⎛ 2 b - x(t) b - x(t) ↪
↪ + 2⋅a⋅x(t)⋅ℯ ⎠⋅⎝a⋅uₓ(t)⋅x (t)⋅ℯ - 4⋅a⋅uₓ(t)⋅x(t)⋅ℯ ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ uₓ(t) ↪
↪ ↪
↪ ↪
↪ ⎛ ↪
↪ b - x(t)⎞ ⎜⎛ 2 b - x(t) b - x(t)⎞ ↪
↪ + 2⋅a⋅uₓ(t)⋅ℯ ⎠⋅uₓ(t) - m⋅⎝⎝- a⋅x (t)⋅ℯ + 2⋅a⋅x(t)⋅ℯ ⎠ ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ d ↪
↪ - ──(x(t)) ↪
↪ dt ↪
↪ ↪
↪ 2 ⎞ ⎛ ⎛ ↪
↪ ⎟ d ⎛ 2 b - x(t) b - x(t)⎞ ⎜friction⋅⎝a⋅x ↪
↪ + 1⎠⋅──(uₓ(t)) + ⎝- a⋅x (t)⋅ℯ + 2⋅a⋅x(t)⋅ℯ ⎠⋅⎜───────────── ↪
↪ dt ⎜ _______ ↪
↪ ⎜ ╱ ↪
↪ ⎜ ╱ ⎛ 2 ↪
↪ ⎝ ╲╱ ⎝a⋅x ( ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ 2 b - x(t) b - x(t)⎞ ⎛ 2 b - x(t) ↪
↪ (t)⋅ℯ - 2⋅a⋅x(t)⋅ℯ ⎠⋅uₓ(t) ⎝a⋅x (t)⋅ℯ - 2 ↪
↪ ────────────────────────────────────────── - g⋅m - ───────────────────────── ↪
↪ ________________________________________ _____________________ ↪
↪ 2 ╱ ↪
↪ b - x(t) b - x(t)⎞ ╱ ⎛ 2 b - x(t) ↪
↪ t)⋅ℯ - 2⋅a⋅x(t)⋅ℯ ⎠ + 1 ╲╱ ⎝a⋅x (t)⋅ℯ - ↪
↪ ↪
↪ ↪
↪ ↪
↪ ↪
↪ b - x(t)⎞ ⎞ ↪
↪ ⋅a⋅x(t)⋅ℯ ⎠⋅F(t) ⎟ F(t) ↪
↪ ──────────────────────────⎟ + ────────────────────────────────────────────── ↪
↪ __________________________⎟ __________________________________________ ↪
↪ 2 ⎟ ╱ 2 ↪
↪ b - x(t)⎞ ⎟ ╱ ⎛ 2 b - x(t) b - x(t)⎞ ↪
↪ 2⋅a⋅x(t)⋅ℯ ⎠ + 1 ⎠ ╲╱ ⎝a⋅x (t)⋅ℯ - 2⋅a⋅x(t)⋅ℯ ⎠ ↪
↪ ⎤
↪ ⎥
↪ ⎥
↪ ⎥
↪ ⎥
↪ ⎥
↪ ─────⎥
↪ _____⎥
↪ ⎥
↪ ⎥
↪ + 1 ⎦
Store the results of the two optimizations for later plotting
solution_list = []
prob_list = []
info_list = []
Define the known parameters.
par_map = {}
par_map[m] = 1.0
par_map[g] = 9.81
par_map[friction] = 0.0
par_map[a] = 1.5
par_map[b] = 2.5
num_nodes = 150
fixed_duration = 6.0 # seconds
Set up the optimization problems and solve them.
for selection in (0, 1):
state_symbols = (speicher[0], speicher[1])
num_states = len(state_symbols)
constant_symbols = (m, g, friction, a, b)
specified_symbols = (speicher[2], )
if selection == 1: # minimize integral of force magnitude
duration = fixed_duration
interval_value = duration/(num_nodes - 1)
def obj(free):
Fx = free[num_states*num_nodes:(num_states + 1)*num_nodes]
return interval_value*np.sum(Fx**2)
def obj_grad(free):
grad = np.zeros_like(free)
l1 = num_states*num_nodes
l2 = (num_states + 1)*num_nodes
grad[l1: l2] = 2.0*free[l1:l2]*interval_value
return grad
elif selection == 0: # minimize total duration
h = sm.symbols('h')
duration = (num_nodes - 1)*h
interval_value = h
def obj(free):
return free[-1]
def obj_grad(free):
grad = np.zeros_like(free)
grad[-1] = 1.0
return grad
t0, tf = 0.0, duration
initial_guess = np.ones((num_states +
len(specified_symbols))*num_nodes)*0.01
if selection == 0:
initial_guess = np.hstack((initial_guess, 0.02))
initial_state_constraints = {x: 0.0, ux: 0.0}
final_state_constraints = {x: 10.0, ux: 0.0}
instance_constraints = (
tuple(xi.subs({t: t0}) - xi_val for xi, xi_val in
initial_state_constraints.items()) +
tuple(xi.subs({t: tf}) - xi_val for xi, xi_val in
final_state_constraints.items())
)
bounds = {F: (-10., 15.),
x: (initial_state_constraints[x], final_state_constraints[x]),
ux: (0., 100)}
if selection == 0:
bounds[h] = (1.e-5, 1.)
prob = Problem(
obj,
obj_grad,
eom,
state_symbols,
num_nodes,
interval_value,
known_parameter_map=par_map,
instance_constraints=instance_constraints,
bounds=bounds,
backend='numpy',
)
solution, info = prob.solve(initial_guess)
solution_list.append(solution)
info_list.append(info)
prob_list.append(prob)
Animate the solutions and plot the results.
def drucken(selection, fig, ax, video=True):
solution = solution_list[selection]
if selection == 0:
duration = (num_nodes - 1)*solution[-1]
times = prob.time_vector(solution=solution)
else:
duration = fixed_duration
times = prob.time_vector()
interval_value = duration/(num_nodes - 1)
strasse1 = strasse(x, a, b)
strasse_lam = sm.lambdify((x, a, b), strasse1, cse=True)
P0_x = solution[:num_nodes]
P0_y = strasse_lam(P0_x, par_map[a], par_map[b])
# find the force vector applied to the block
alpha = sm.atan(strasse(x, a, b).diff(x))
Pfeil = [F*sm.cos(alpha), F*sm.sin(alpha)]
Pfeil_lam = sm.lambdify((x, F, a, b), Pfeil, cse=True)
l1 = num_states*num_nodes
l2 = (num_states + 1)*num_nodes
Pfeil_x = Pfeil_lam(P0_x, solution[l1: l2], par_map[a], par_map[b])[0]
Pfeil_y = Pfeil_lam(P0_x, solution[l1: l2], par_map[a], par_map[b])[1]
# needed to give the picture the right size.
xmin = np.min(P0_x)
xmax = np.max(P0_x)
ymin = np.min(P0_y)
ymax = np.max(P0_y)
def initialize_plot():
ax.set_xlim(xmin-1, xmax + 1.)
ax.set_ylim(ymin-1, ymax + 1.)
ax.set_aspect('equal')
ax.set_xlabel('X-axis [m]')
ax.set_ylabel('Y-axis [m]')
if selection == 0:
msg = 'The speed is optimized'
else:
msg = 'The energy optimized'
ax.grid()
strasse_x = np.linspace(xmin, xmax, 100)
ax.plot(strasse_x, strasse_lam(strasse_x, par_map[a], par_map[b]),
color='black', linestyle='-', linewidth=1)
ax.axvline(initial_state_constraints[x], color='r', linestyle='--',
linewidth=1)
ax.axvline(final_state_constraints[x], color='green', linestyle='--',
linewidth=1)
# Initialize the block and the arrow
line1, = ax.plot([], [], color='blue', marker='o', markersize=12)
pfeil = ax.quiver([], [], [], [], color='green', scale=35, width=0.004)
return line1, pfeil, msg
line1, pfeil, msg = initialize_plot()
# Function to update the plot for each animation frame
def update(frame):
message = (f'Running time {times[frame]:.2f} sec \n'
'The red line is the initial position, the green line is '
'the final position \n'
'The green arrow is the force acting on the block \n'
f'{msg}')
ax.set_title(message, fontsize=12)
line1.set_data([P0_x[frame]], [P0_y[frame]])
pfeil.set_offsets([P0_x[frame], P0_y[frame]])
pfeil.set_UVC(Pfeil_x[frame], Pfeil_y[frame])
return line1, pfeil
if video:
animation = FuncAnimation(fig, update, frames=range(len(P0_x)),
interval=1000*interval_value)
else:
animation = None
return animation, update
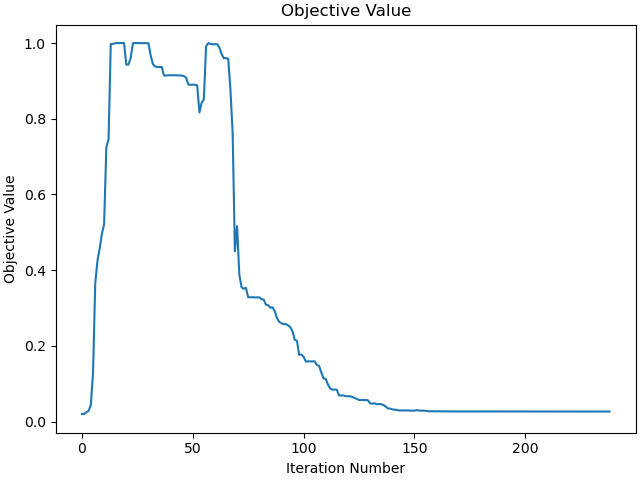
Below the results of minimized duration are shown.
selection = 0
print('Message from optimizer:', info_list[selection]['status_msg'])
print(f'Optimal h value is: {solution_list[selection][-1]:.3f}')
Message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Optimal h value is: 0.027
_ = prob_list[selection].plot_objective_value()
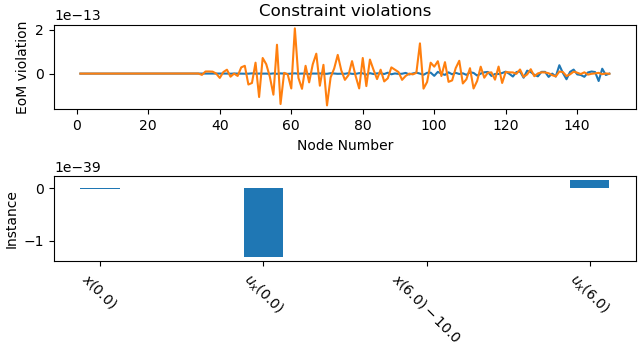
Plot errors in the solution.
_ = prob_list[selection].plot_constraint_violations(solution_list[selection])
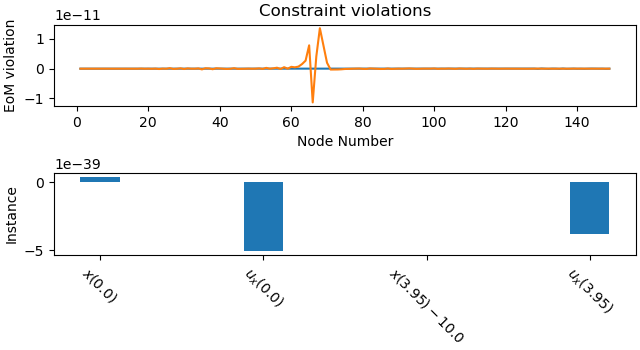
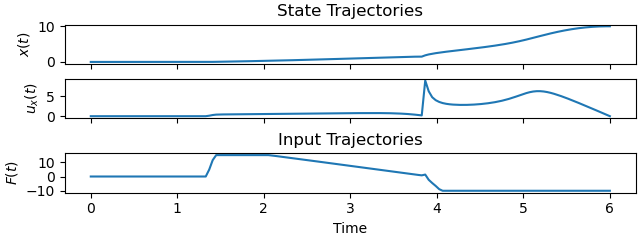
Plot the trajectories of the block.
_ = prob_list[selection].plot_trajectories(solution_list[selection])
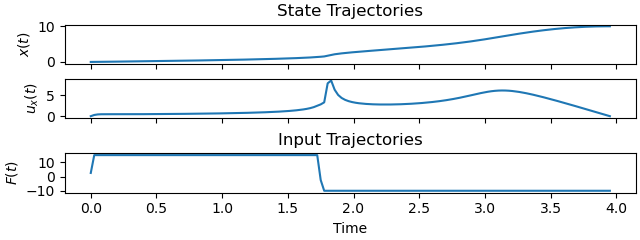
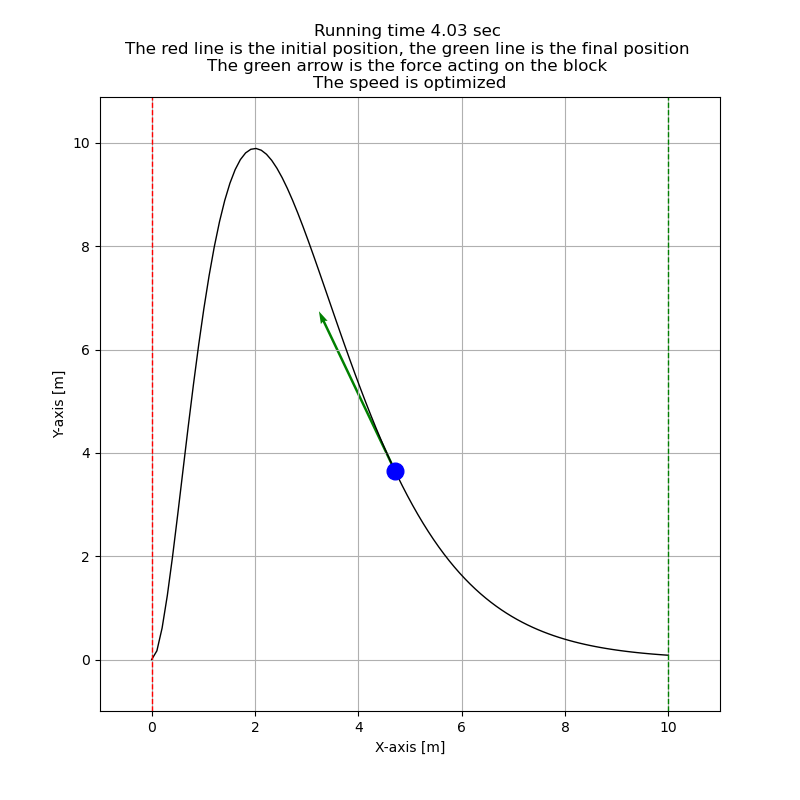
Animate the solution.
fig, ax = plt.subplots(figsize=(8, 8))
anim, _ = drucken(selection, fig, ax)
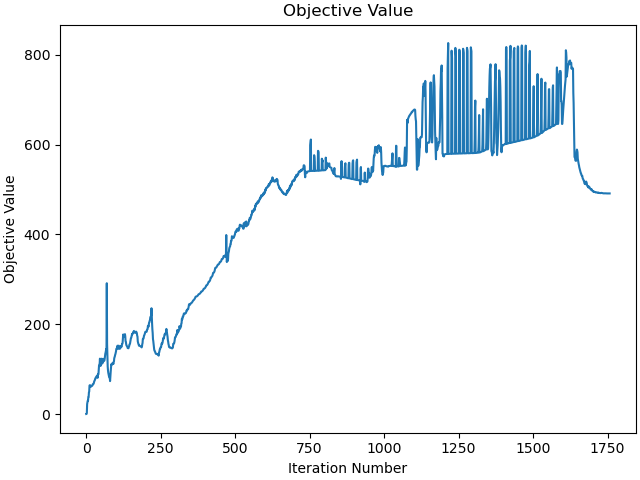
Now the results of minimized energy are shown.
selection = 1
print('Message from optimizer:', info_list[selection]['status_msg'])
Message from optimizer: b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
_ = prob_list[selection].plot_objective_value()
Plot errors in the solution.
_ = prob_list[selection].plot_constraint_violations(solution_list[selection])
Plot the trajectories of the block.
_ = prob_list[selection].plot_trajectories(solution_list[selection])
Animate the solution.
fig, ax = plt.subplots(figsize=(8, 8))
anim, _ = drucken(selection, fig, ax)
A frame from the animation.
fig, ax = plt.subplots(figsize=(8, 8))
_, update = drucken(0, fig, ax, video=False)
update(100)
plt.show()
Total running time of the script: (2 minutes 0.155 seconds)