Note
Go to the end to download the full example code.
Parameter Identification: Betts & Huffman 2003¶
This is the single parameter identification problem presented in section 7 of [Betts2003].
Objectives¶
Show how to execute a parameter identification.
Show how to handle time being explicit in the equations of motion using a known trajectory set to time.
import numpy as np
import sympy as sym
import matplotlib.pyplot as plt
from opty import Problem
duration = 1.0 # seconds
num_nodes = 100
interval = duration / (num_nodes - 1)
Define the variables.
mu, p, t = sym.symbols('mu, p, t')
y1, y2, T = sym.symbols('y1, y2, T', cls=sym.Function)
state_symbols = (y1(t), y2(t))
constant_symbols = (mu, p)
Define the symbolic equations of motion
Use a trick here because time was explicit in the eoms. Set T(t) to a function of time and then pass in time as a known trajectory in the problem.
eom = sym.Matrix([
y1(t).diff(t) - y2(t),
y2(t).diff(t) - mu**2 * y1(t) + (mu**2 + p**2) * sym.sin(p * T(t)),
])
Specify the known system parameters.
par_map = {mu: 60.0}
Generate data representing measurements of the system’s motion.
time = np.linspace(0.0, 1.0, num=num_nodes)
y1_m = np.sin(np.pi * time) + np.random.normal(scale=0.05, size=len(time))
y2_m = np.pi * np.cos(np.pi * time) + np.random.normal(scale=0.05,
size=len(time))
Specify the objective function and its gradient to minimize the sum of the
squares of y1.
def obj(free):
return interval * np.sum((y1_m - free[:num_nodes])**2)
def obj_grad(free):
grad = np.zeros_like(free)
grad[:num_nodes] = 2.0 * interval * (free[:num_nodes] - y1_m)
return grad
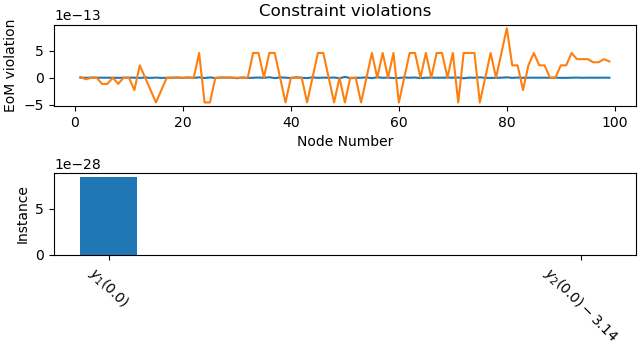
Specify the symbolic instance constraints, i.e. initial and end conditions.
instance_constraints = (y1(0.0), y2(0.0) - np.pi)
Create an optimization problem.
prob = Problem(obj, obj_grad,
eom, state_symbols,
num_nodes, interval,
known_parameter_map=par_map,
known_trajectory_map={T(t): time},
instance_constraints=instance_constraints,
time_symbol=t,
integration_method='midpoint')
Use a random positive initial guess.
initial_guess = np.random.randn(prob.num_free)
Find the optimal solution.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Print results.
known_msg = "Known value of p = {}".format(np.pi)
identified_msg = "Identified value of p = {}".format(solution[-1])
divider = '=' * max(len(known_msg), len(identified_msg))
print(divider)
print(known_msg)
print(identified_msg)
print(divider)
==========================================
Known value of p = 3.141592653589793
Identified value of p = 3.1409353268742914
==========================================
Plot results.
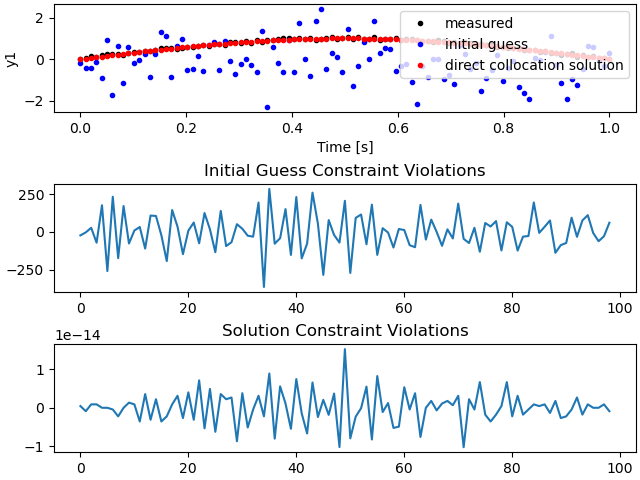
fig_y1, axes_y1 = plt.subplots(3, 1, layout='constrained')
legend = ['measured', 'initial guess', 'direct collocation solution']
axes_y1[0].plot(time, y1_m, '.k',
time, initial_guess[:num_nodes], '.b',
time, solution[:num_nodes], '.r')
axes_y1[0].set_xlabel('Time [s]')
axes_y1[0].set_ylabel('y1')
axes_y1[0].legend(legend)
axes_y1[1].set_title('Initial Guess Constraint Violations')
axes_y1[1].plot(prob.con(initial_guess)[:num_nodes - 1])
axes_y1[2].set_title('Solution Constraint Violations')
axes_y1[2].plot(prob.con(solution)[:num_nodes - 1])
[<matplotlib.lines.Line2D object at 0x78c826df3a10>]
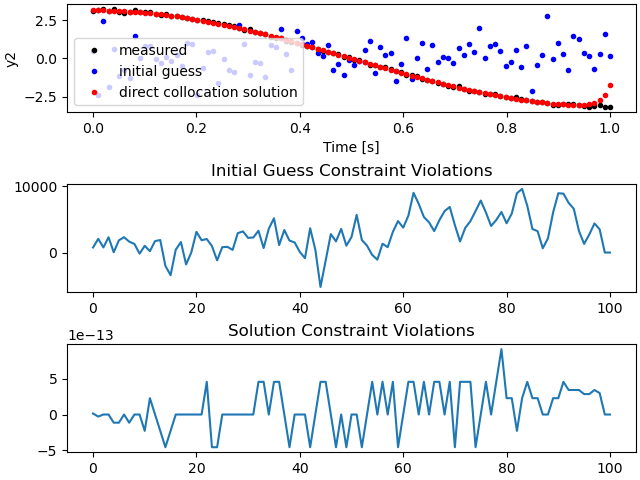
fig_y2, axes_y2 = plt.subplots(3, 1, layout='constrained')
axes_y2[0].plot(time, y2_m, '.k',
time, initial_guess[num_nodes:-1], '.b',
time, solution[num_nodes:-1], '.r')
axes_y2[0].set_xlabel('Time [s]')
axes_y2[0].set_ylabel('y2')
axes_y2[0].legend(legend)
axes_y2[1].set_title('Initial Guess Constraint Violations')
axes_y2[1].plot(prob.con(initial_guess)[num_nodes - 1:])
axes_y2[2].set_title('Solution Constraint Violations')
axes_y2[2].plot(prob.con(solution)[num_nodes - 1:])
[<matplotlib.lines.Line2D object at 0x78c82733bcb0>]
_ = prob.plot_constraint_violations(solution)
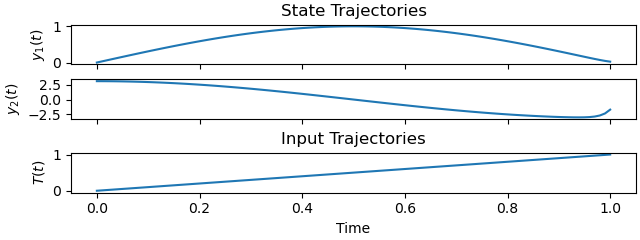
_ = prob.plot_trajectories(solution)
plt.show()
Total running time of the script: (0 minutes 31.614 seconds)