Note
Go to the end to download the full example code.
Fixed Duration Pendulum Swing Up¶
Objective¶
Show the use of opty with likely the simplest example possible.
Introduction¶
Given a compound pendulum that is driven by a torque about its joint axis, swing the pendulum from hanging down to standing up in a fixed amount of time using minimal input torque with a bounded torque magnitude.
Notes¶
This example uses a fixed duration. There is an example which is mechanically identical to this one, but it uses a variable time interval, to get the pendulum up as fast as possible, given the torque limitations.
import numpy as np
import sympy as sm
from opty import Problem, create_objective_function
import matplotlib.pyplot as plt
import matplotlib.animation as animation
Start with defining the fixed duration and number of nodes.
duration = 10.0 # seconds
num_nodes = 501
interval_value = duration/(num_nodes - 1)
Specify the symbolic equations of motion.
I, m, g, d, t = sm.symbols('I, m, g, d, t')
theta, omega, T = sm.symbols('theta, omega, T', cls=sm.Function)
state_symbols = (theta(t), omega(t))
constant_symbols = (I, m, g, d)
specified_symbols = (T(t),)
eom = sm.Matrix([theta(t).diff() - omega(t),
I*omega(t).diff() + m*g*d*sm.sin(theta(t)) - T(t)])
sm.pprint(eom)
⎡ d ⎤
⎢ -ω(t) + ──(θ(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢I⋅──(ω(t)) + d⋅g⋅m⋅sin(θ(t)) - T(t)⎥
⎣ dt ⎦
Specify the known system parameters.
par_map = {
I: 1.0,
m: 1.0,
g: 9.81,
d: 1.0,
}
Specify the objective function and it’s gradient, in this case it calculates the area under the input torque curve over the simulation.
obj_func = sm.Integral(T(t)**2, t)
sm.pprint(obj_func)
obj, obj_grad = create_objective_function(obj_func, state_symbols,
specified_symbols, tuple(),
num_nodes,
interval_value,
time_symbol=t)
⌠
⎮ 2
⎮ T (t) dt
⌡
Specify the symbolic instance constraints, i.e. initial and end conditions, where the pendulum starts a zero degrees (hanging down) and ends at 180 degrees (standing up).
target_angle = np.pi # radians
instance_constraints = (
theta(0.0),
theta(duration) - target_angle,
omega(0.0),
omega(duration),
)
Limit the torque to a maximum magnitude.
bounds = {T(t): (-2.0, 2.0)}
Create an optimization problem.
prob = Problem(obj, obj_grad, eom, state_symbols, num_nodes, interval_value,
known_parameter_map=par_map,
instance_constraints=instance_constraints,
bounds=bounds,
time_symbol=t,
backend='numpy')
# Use a random positive initial guess.
initial_guess = np.random.randn(prob.num_free)
Find the optimal solution.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
print(info['obj_val'])
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
15.641553623553241
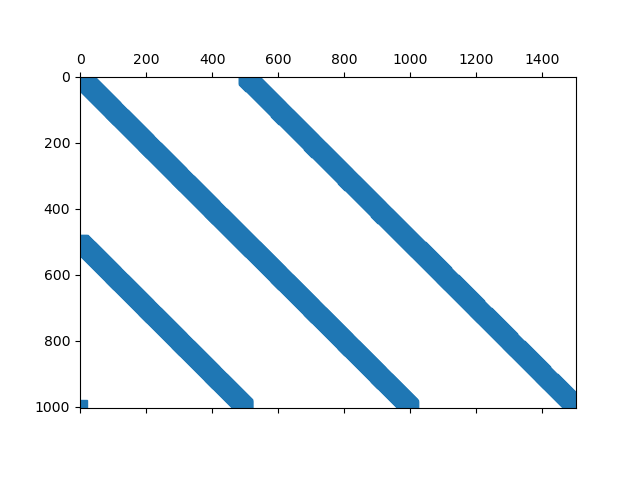
Plot the sparsity pattern of the Jacobian.
_ = prob.plot_jacobian_sparsity()
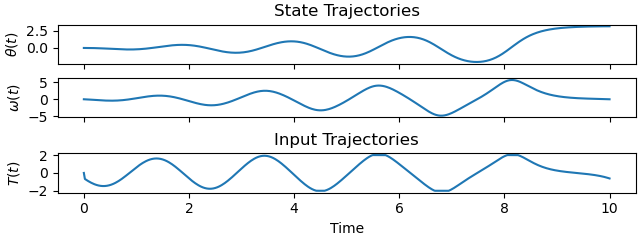
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
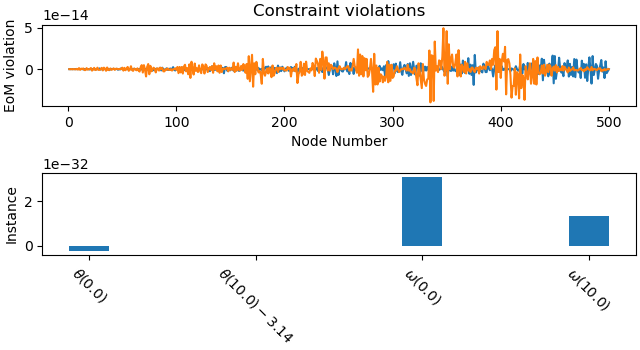
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)
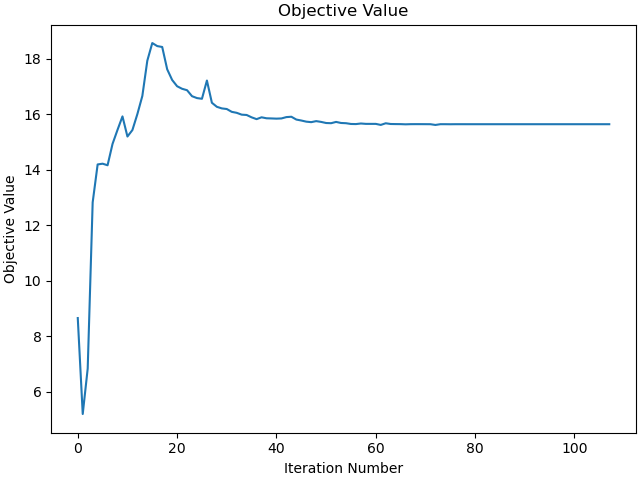
Plot the objective function as a function of optimizer iteration.
_ = prob.plot_objective_value()
Animate the pendulum swing up.
time = prob.time_vector()
angle = solution[:num_nodes]
fig = plt.figure()
ax = fig.add_subplot(111, aspect='equal', autoscale_on=False,
xlim=(-2, 2), ylim=(-2, 2))
ax.grid()
line, = ax.plot([], [], 'o-', lw=2)
time_template = 'time = {:0.1f}s'
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
def init():
line.set_data([], [])
time_text.set_text('')
return line, time_text
def animate(i):
x = [0, par_map[d]*np.sin(angle[i])]
y = [0, -par_map[d]*np.cos(angle[i])]
line.set_data(x, y)
time_text.set_text(time_template.format(time[i]))
return line, time_text
ani = animation.FuncAnimation(fig, animate, range(0, num_nodes, 4),
interval=int(interval_value*1000*4), blit=True,
init_func=init)
plt.show()
Total running time of the script: (0 minutes 42.985 seconds)