Note
Go to the end to download the full example code.
Compare DAE vs. ODE Formulation¶
Objective¶
To compare the results of the DAE and ODE formulations of the same problem. In one case one equation of motion is an algebraic equation (case 10.103), in the other case \(\dfrac{d}{dt}(\textrm{algebraic equation})\) is used.
Introduction¶
This is example 10.103 from [Betts2010]’s test problems. It has four differential equations and one algebraic equation. This example compares two solutions, the first uses the algebraic equation directly and the second uses the derivative of the algebraic equation, i.e. converts the DAEs to ODEs.
As expected, the DAE formulation gives a better result than the ODE formulation. The ODE formulation seems to run a bit faster.
States
\(y_0,...,y_4\) : state variables
Specifieds
\(u\) : control variable
import numpy as np
import sympy as sm
import sympy.physics.mechanics as me
from opty.direct_collocation import Problem
from opty.utils import create_objective_function
Information Common to Both Formulations¶
Define the time varying variables.
t = me.dynamicsymbols._t
y = me.dynamicsymbols('y0, y1, y2, y3, y4')
u = me.dynamicsymbols('u')
# Define the constant parameters.
g = 9.81
Set up the time intervals.
tf = 3.0
num_nodes = 751
t0, tf = 0.0, tf
interval_value = (tf - t0)/(num_nodes - 1)
Specify the objective function and form the gradient.
obj_func = sm.Integral(u**2, t)
sm.pprint(obj_func)
obj, obj_grad = create_objective_function(
obj_func,
y,
(u,),
tuple(),
num_nodes,
node_time_interval=interval_value,
time_symbol=t,
)
⌠
⎮ 2
⎮ u (t) dt
⌡
Specify the symbolic instance constraints.
instance_constraints = (
y[0].func(t0) - 1,
*[y[i].func(t0) - 0 for i in range(1, 5)],
y[0].func(tf) - 0,
y[2].func(tf) - 0,
)
Specify the bounds.
bounds = {
y[0]: (-5, 5),
y[1]: (-5, 5),
y[2]: (-5, 5),
y[3]: (-5, 5),
y[4]: (-1, 15),
}
DAE Formulation¶
Define the differential algebraic equations of motion.
eom = sm.Matrix([
-y[0].diff(t) + y[2],
-y[1].diff(t) + y[3],
-y[2].diff(t) - 2*y[4]*y[0] + u*y[1],
-y[3].diff(t) - g - 2*y[4]*y[1] - u*y[0],
y[2]**2 + y[3]**2 - 2*y[4] - g*y[1],
])
sm.pprint(eom)
⎡ d ⎤
⎢ y₂(t) - ──(y₀(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢ y₃(t) - ──(y₁(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢ u(t)⋅y₁(t) - 2⋅y₀(t)⋅y₄(t) - ──(y₂(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢-u(t)⋅y₀(t) - 2⋅y₁(t)⋅y₄(t) - ──(y₃(t)) - 9.81⎥
⎢ dt ⎥
⎢ ⎥
⎢ 2 2 ⎥
⎣ -9.81⋅y₁(t) + y₂ (t) + y₃ (t) - 2⋅y₄(t) ⎦
Create the optimization problem and set any options.
prob = Problem(
obj,
obj_grad,
eom,
y,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
bounds=bounds,
)
prob.add_option('nlp_scaling_method', 'gradient-based')
# Give rough estimates for the x and y trajectories.
initial_guess = np.zeros(prob.num_free)
# Find the optimal solution.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
if info['obj_val'] < 12.8738850:
msg = 'opty with DAE gets a better result'
else:
msg = 'opty with DAE gets a worse result'
print(f'Minimal objective value achieved: {info["obj_val"]:.4f}, ' +
f'as per the book it is {12.8738850}, {msg} ')
obj_DAE = info["obj_val"]
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Minimal objective value achieved: 12.0434, as per the book it is 12.873885, opty with DAE gets a better result
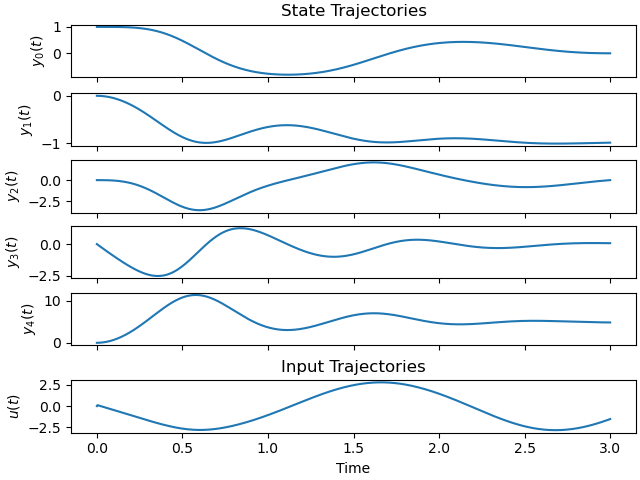
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)
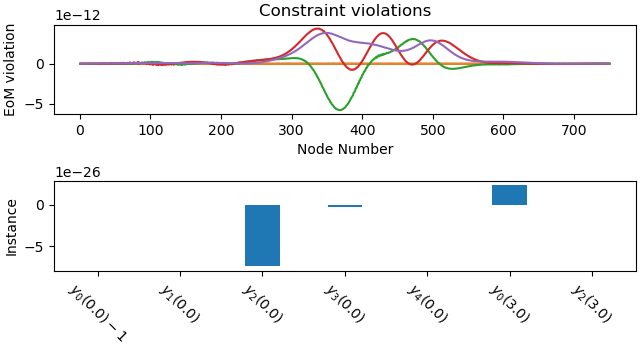
Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)
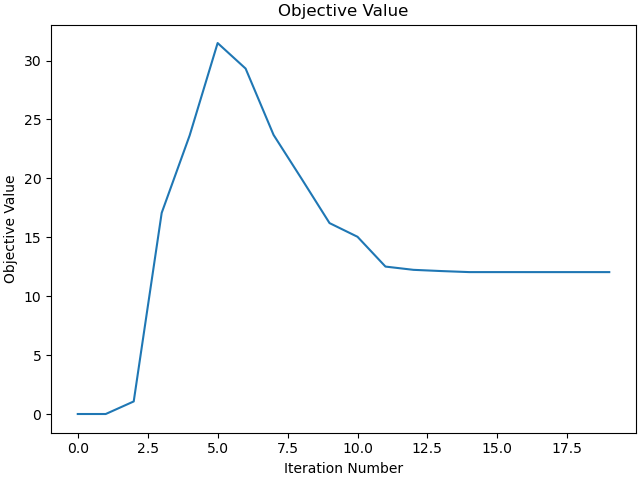
Plot the objective function as a function of optimizer iteration.
_ = prob.plot_objective_value()
ODE Formulation¶
Differentiate the algebraic equation with respect to time and add it to the equations of motion instead of the algebraic equation, as before.
eom = sm.Matrix([
-y[0].diff(t) + y[2],
-y[1].diff(t) + y[3],
-y[2].diff(t) - 2*y[4]*y[0] + u*y[1],
-y[3].diff(t) - g - 2*y[4]*y[1] - u*y[0],
-y[4].diff(t) + y[2]*y[2].diff(t) + y[3]*y[3].diff(t) - g*y[1].diff(t)/2,
])
sm.pprint(eom)
⎡ d ⎤
⎢ y₂(t) - ──(y₀(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢ y₃(t) - ──(y₁(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢ u(t)⋅y₁(t) - 2⋅y₀(t)⋅y₄(t) - ──(y₂(t)) ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d ⎥
⎢ -u(t)⋅y₀(t) - 2⋅y₁(t)⋅y₄(t) - ──(y₃(t)) - 9.81 ⎥
⎢ dt ⎥
⎢ ⎥
⎢ d d d d ⎥
⎢y₂(t)⋅──(y₂(t)) + y₃(t)⋅──(y₃(t)) - 4.905⋅──(y₁(t)) - ──(y₄(t))⎥
⎣ dt dt dt dt ⎦
Create the optimization problem and set any options.
prob = Problem(
obj,
obj_grad,
eom,
y,
num_nodes,
interval_value,
instance_constraints=instance_constraints,
bounds=bounds,
)
Find the optimal solution.
solution, info = prob.solve(initial_guess)
print(info['status_msg'])
if info['obj_val'] < 12.8738850:
msg = 'opty with ODE gets a better result'
else:
msg = 'opty with ODE gets a worse result'
print(f'Minimal objective value achieved: {info["obj_val"]:.4f}, ' +
f'as per the book it is {12.8738850}, {msg} ')
obj_ODE = info["obj_val"]
b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'
Minimal objective value achieved: 12.5526, as per the book it is 12.873885, opty with ODE gets a better result
Plot the optimal state and input trajectories.
_ = prob.plot_trajectories(solution)

Plot the constraint violations.
_ = prob.plot_constraint_violations(solution)

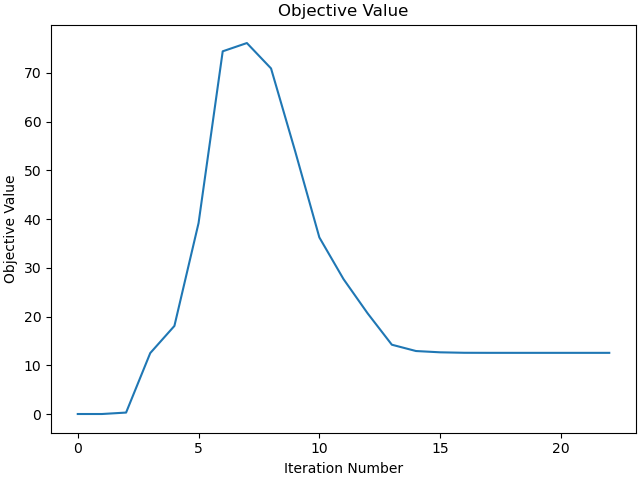
Plot the objective function as a function of optimizer iteration.
_ = prob.plot_objective_value()
Compare the results¶
if obj_DAE < obj_ODE:
value = (obj_ODE - obj_DAE)/obj_ODE*100
print(f'DAE formulation gives a better result by {value:.2f} %')
else:
value = (obj_DAE - obj_ODE)/obj_DAE*100
print(f'ODE formulation gives a better result by {value:.2f} %')
DAE formulation gives a better result by 4.06 %
Total running time of the script: (1 minutes 4.344 seconds)