Note
Go to the end to download the full example code.
Sit to Stand¶
The optimal control goal is to find the joint torques (hip, knee, ankle) that generate a minimal mean-torque for a person to stand from a seated position. gait2d provides a joint torque driven 2D bipedal human dynamical model with seven body segments (trunk, thighs, shanks, feet) and foot-ground contact forces based on the description in [Ackermann2010] suitable for this simulation.
Note
pygait2d and symmeplot and their dependencies must be installed first to run this example. Note that pygait2d has not been released to PyPi or Conda Forge:
conda install cython pip pydy pyyaml setuptools symmeplot sympy
python -m pip install --no-deps --no-build-isolation git+https://github.com/csu-hmc/gait2d
Import all necessary modules, functions, and classes:
import os
from opty import Problem
from opty.utils import f_minus_ma
from pygait2d import derive, simulate
from pygait2d.segment import time_symbol, contact_force
from symmeplot.matplotlib import Scene3D
import matplotlib.pyplot as plt
import numpy as np
import sympy as sm
Pick the number of discretization nodes and define the time step as a variable \(h\).
num_nodes = 60
h = sm.symbols('h', real=True, positive=True)
duration = (num_nodes - 1)*h
Derive the equations of motion using gait2d, including a force acting on the hip joint from the seat surface above the ground.
symbolics = derive.derive_equations_of_motion(seat_force=True)
num_states = len(symbolics.states)
eom = symbolics.equations_of_motion
eom.shape
(18, 1)
The equations of motion have this many mathematical operations:
sm.count_ops(eom)
125504
The generalized coordinates are the hip lateral position \(q_{ax}\) and vertical position \(q_{ay}\), the trunk angle with respect to vertical \(q_a\) and the relative joint angles:
right: hip (b), knee (c), ankle (d)
left: hip (e), knee (f), ankle (g)
Each joint has a joint torque acting between the adjacent bodies.
qax, qay, qa, qb, qc, qd, qe, qf, qg = symbolics.coordinates
uax, uay, ua, ub, uc, ud, ue, uf, ug = symbolics.speeds
Fax, Fay, Ta, Tb, Tc, Td, Te, Tf, Tg = symbolics.specifieds
The model constants describe the geometry, mass, and inertia of the human. We will need some geometry for defining the seating position:
ya: trunk hip to mass center lengthlb: thigh lengthlc: shank lengthfyd: foot depth
(g, ma, ia, xa, ya, mb, ib, lb, xb, yb, mc, ic, lc, xc, yc, md, id_, xd, yd,
hxd, txd, fyd, me, ie, le, xe, ye, mf, if_, lf, xf, yf, mg, ig, xg, yg, hxg,
txg, fyg, kc, cc, mu, vs) = symbolics.constants
The constant values are loaded from a file of realistic geometry, mass, inertia, and foot deformation properties of an adult human.
par_map = simulate.load_constants(symbolics.constants,
'human-gait-constants.yml')
par_map
{g: 9.81, ma: 50.85, ia: 3.1777, xa: 0.0, ya: 0.3155, mb: 7.5, ib: 0.1522, lb: 0.441, xb: 0.0, yb: -0.191, mc: 3.4875, ic: 0.0624, lc: 0.4428, xc: 0.0, yc: -0.1917, md: 1.0875, id: 0.0184, xd: 0.0768, yd: -0.0351, hxd: -0.06, txd: 0.15, fyd: -0.07, me: 7.5, ie: 0.1522, le: 0.441, xe: 0.0, ye: -0.191, mf: 3.4875, if: 0.0624, lf: 0.4428, xf: 0.0, yf: -0.1917, mg: 1.0875, ig: 0.0184, xg: 0.0768, yg: -0.0351, hxg: -0.06, txg: 0.15, fyg: -0.07, kc: 50000000.0, cc: 0.85, mu: 1.0, vs: 0.01}
gait2d provides “hand of god” inputs to manipulate the trunk for some modeling purposes. Set these to zero.
traj_map = {
Fax: np.zeros(num_nodes),
Fay: np.zeros(num_nodes),
Ta: np.zeros(num_nodes),
}
Bound all the states to human realizable ranges.
The trunk should stay generally upright but can lean back and forth.
Only let the hip, knee, and ankle flex and extend to realistic limits.
Put a maximum on the peak joint torque values.
bounds = {
h: (0.001, 0.1),
qax: (0.0, 5.0),
qay: (0.2, 1.5),
qa: np.deg2rad((-60.0, 90.0)),
uax: (-10.0, 10.0),
uay: (-10.0, 10.0),
}
# hip
bounds.update({k: (-np.deg2rad(60.0), np.deg2rad(150.0))
for k in [qb, qe]})
# knee
bounds.update({k: (-np.deg2rad(150.0), 0.0)
for k in [qc, qf]})
# foot
bounds.update({k: (-np.deg2rad(30.0), np.deg2rad(30.0))
for k in [qd, qg]})
# all rotational speeds
bounds.update({k: (-np.deg2rad(400.0), np.deg2rad(400.0))
for k in [ua, ub, uc, ud, ue, uf, ug]})
# all joint torques
bounds.update({k: (-500.0, 500.0)
for k in [Tb, Tc, Td, Te, Tf, Tg]})
Set the configuration to be seated at the start and standing at the finish. Subtract a bit from the final height because the feet compress into the ground.
instance_constraints = (
# start seated
qax.func(0*h) - 0.0,
qay.func(0*h) - (-fyd + lc),
qa.func(0*h) - 0.0,
qb.func(0*h) - np.deg2rad(90.0),
qc.func(0*h) + np.deg2rad(90.0),
qd.func(0*h) - 0.0,
qe.func(0*h) - np.deg2rad(90.0),
qf.func(0*h) + np.deg2rad(90.0),
qg.func(0*h) - 0.0,
# end standing
qax.func(duration) - lb,
qay.func(duration) - (-fyd + lb + lc - 0.02),
qa.func(duration) - 0.0,
qb.func(duration) - 0.0,
qc.func(duration) - 0.0,
qd.func(duration) - 0.0,
qe.func(duration) - 0.0,
qf.func(duration) - 0.0,
qg.func(duration) - 0.0,
# stationary at start and end
uax.func(0*h) - 0.0,
uay.func(0*h) - 0.0,
ua.func(0*h) - 0.0,
ub.func(0*h) - 0.0,
uc.func(0*h) - 0.0,
ud.func(0*h) - 0.0,
ue.func(0*h) - 0.0,
uf.func(0*h) - 0.0,
ug.func(0*h) - 0.0,
uax.func(duration) - 0.0,
uay.func(duration) - 0.0,
ua.func(duration) - 0.0,
ub.func(duration) - 0.0,
uc.func(duration) - 0.0,
ud.func(duration) - 0.0,
ue.func(duration) - 0.0,
uf.func(duration) - 0.0,
ug.func(duration) - 0.0,
)
The objective is to minimize the mean of all joint torques.
def obj(free):
"""Minimize the sum of the squares of the control torques."""
T, h = free[num_states*num_nodes:-1], free[-1]
return h*np.sum(T**2)
def obj_grad(free):
T, h = free[num_states*num_nodes:-1], free[-1]
grad = np.zeros_like(free)
grad[num_states*num_nodes:-1] = 2.0*h*T
grad[-1] = np.sum(T**2)
return grad
Create an optimization problem and solve it.
prob = Problem(
obj,
obj_grad,
eom,
symbolics.states,
num_nodes,
h,
known_parameter_map=par_map,
known_trajectory_map=traj_map,
instance_constraints=instance_constraints,
bounds=bounds,
time_symbol=time_symbol,
parallel=True,
)
This loads a precomputed solution to save computation time. Delete the file to try the suggested initial guess.
fname = f'human_sit_to_stand_{num_nodes}_nodes_solution.csv'
if os.path.exists(fname):
initial_guess = np.loadtxt(fname)
else:
# choose one, comment others
initial_guess = np.zeros(prob.num_free)
# h
initial_guess[-1] = 2.0/num_nodes
# qax
initial_guess[0*num_nodes:1*num_nodes] = np.linspace(
0.0, par_map[lb], num=num_nodes)
# qay
initial_guess[1*num_nodes:2*num_nodes] = np.linspace(
(-par_map[fyd] + par_map[lc]),
(-par_map[fyd] + par_map[lb] + par_map[lc]),
num=num_nodes)
# qb
initial_guess[3*num_nodes:4*num_nodes] = np.linspace(
np.deg2rad(90.0), 0.0, num=num_nodes)
# qc
initial_guess[4*num_nodes:5*num_nodes] = np.linspace(
np.deg2rad(-90.0), 0.0, num=num_nodes)
# qe
initial_guess[6*num_nodes:7*num_nodes] = np.linspace(
np.deg2rad(90.0), 0.0, num=num_nodes)
# qf
initial_guess[7*num_nodes:8*num_nodes] = np.linspace(
np.deg2rad(-90.0), 0.0, num=num_nodes)
Find the optimal solution and save it if it converges.
solution, info = prob.solve(initial_guess)
if info['status'] in (0, 1):
np.savetxt(fname, solution, fmt='%.2f')
Plot the solution.
_ = prob.plot_trajectories(solution)

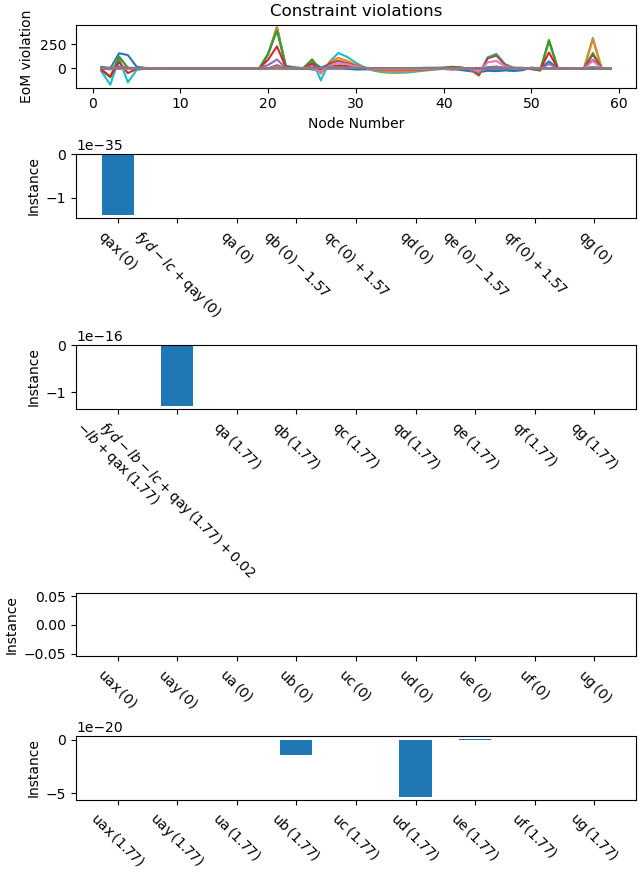
Plot the constraint violations of the solution.
_ = prob.plot_constraint_violations(solution)
Use symmeplot to make an animation of the motion. sphinx_gallery_thumbnail_number = 3
xs, rs, _, h_val = prob.parse_free(solution)
times = prob.time_vector(solution=solution)
def animate(fname='animation.gif'):
ground, origin = symbolics.inertial_frame, symbolics.origin
trunk, rthigh, rshank, rfoot, lthigh, lshank, lfoot = symbolics.segments
fig, ax = plt.subplots(subplot_kw={'projection': '3d'})
scene = Scene3D(ground, origin, ax=ax)
# creates the stick person
scene.add_line([
rshank.joint,
rfoot.toe,
rfoot.heel,
rshank.joint,
rthigh.joint,
trunk.joint,
trunk.mass_center,
trunk.joint,
lthigh.joint,
lshank.joint,
lfoot.heel,
lfoot.toe,
lshank.joint,
], color="k")
# ground
scene.add_line([
origin.locatenew('left', -0.8*ground.x),
origin.locatenew('right', 0.8*ground.x),
], color='black')
# seat
seat_level = origin.locatenew('seat', (rshank.length_symbol -
rfoot.foot_depth)*ground.y)
scene.add_line([
seat_level.locatenew('top', -0.2*ground.x + 0.5*ground.y),
seat_level.locatenew('left', -0.2*ground.x),
seat_level.locatenew('right', 0.2*ground.x),
], color='black', linewidth=4)
# adds CoM and unit vectors for each body segment
for seg in symbolics.segments:
scene.add_body(seg.rigid_body)
# show ground reaction force vectors at the heels, toes, and hip, scaled to
# visually reasonable length
scene.add_vector(contact_force(trunk.joint, ground, seat_level)/600.0,
trunk.joint, color="tab:blue")
scene.add_vector(contact_force(rfoot.toe, ground, origin)/600.0,
rfoot.toe, color="tab:blue")
scene.add_vector(contact_force(rfoot.heel, ground, origin)/600.0,
rfoot.heel, color="tab:blue")
scene.add_vector(contact_force(lfoot.toe, ground, origin)/600.0,
lfoot.toe, color="tab:blue")
scene.add_vector(contact_force(lfoot.heel, ground, origin)/600.0,
lfoot.heel, color="tab:blue")
scene.lambdify_system(symbolics.states + symbolics.specifieds +
symbolics.constants)
sim_data = np.vstack((
xs, # q, u shape(2n, N)
np.zeros((3, len(times))), # Fax, Fay, Ta (hand of god), shape(3, N)
rs, # r, shape(q, N)
np.repeat(np.atleast_2d(np.array(list(par_map.values()))).T,
len(times), axis=1), # p, shape(r, N)
))
scene.evaluate_system(*sim_data[:, 0])
scene.axes.set_proj_type("ortho")
scene.axes.view_init(90, -90, 0)
scene.plot()
ani = scene.animate(lambda i: sim_data[:, i], frames=len(times),
interval=h_val*1000)
ani.save(fname, fps=int(1/h_val))
return ani
animation = animate('human-sit-to-stand.gif')
plt.show()
Total running time of the script: (0 minutes 48.982 seconds)